From left to right, if the item is not in the right position, swap it with the right item;
after each iteration, the next largest item bubbles up and moves to its correct position
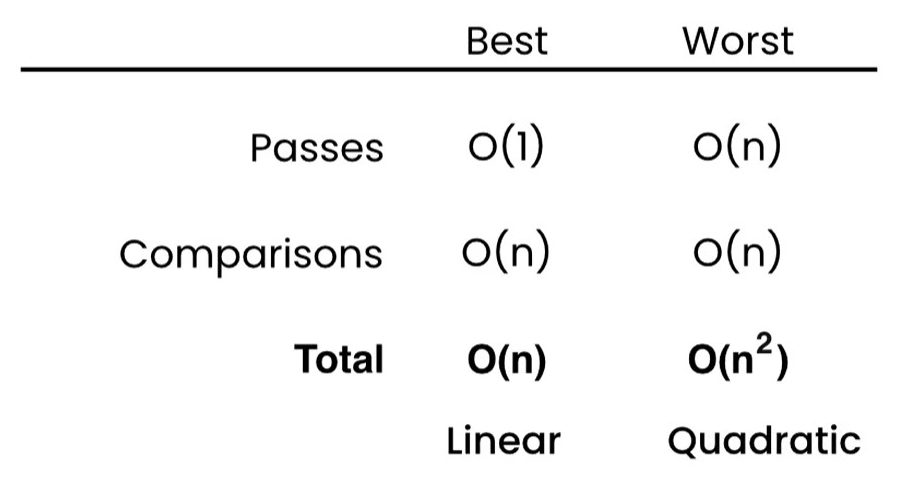
Time complexity:
public class BubbleSort {
public void sort(int[] array) {
boolean isSorted;
for (var i = 0; i < array.length; i++) {
isSorted = true;
for (var j = 1; j < array.length - i; j++)
if (array[j] < array[j - 1]) {
swap(array, j, j - 1);
isSorted = false;
}
if (isSorted)
return;
}
}
private void swap(int[] array, int index1, int index2) {
var temp = array[index1];
array[index1] = array[index2];
array[index2] = temp;
}
}
Selection sort
In each pass, find the next smallest item and move it to the correct position
Time complexity: O(n²), no comparison in each pass
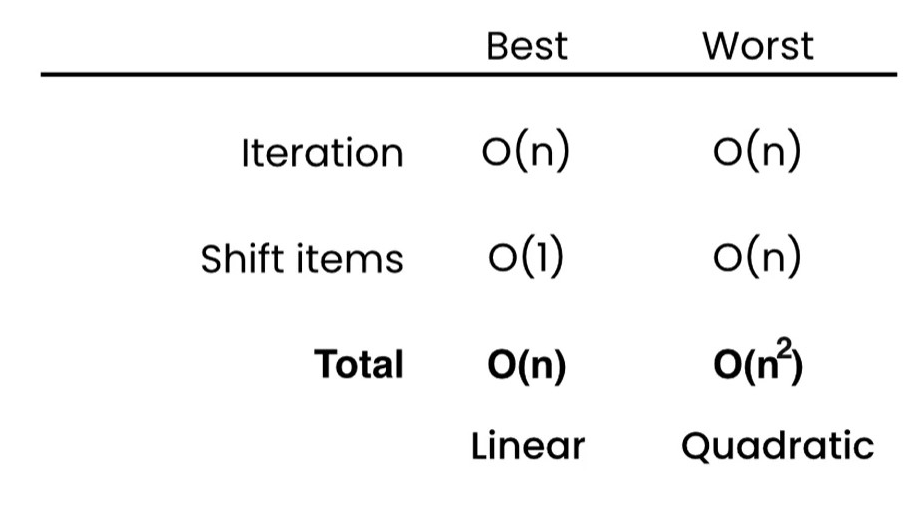
Insertion sort
Each pass, select one item in the unsorted part and insert it into the sorted part. Instead of swapping, shift the items that larger than the current inserting item to make space for it
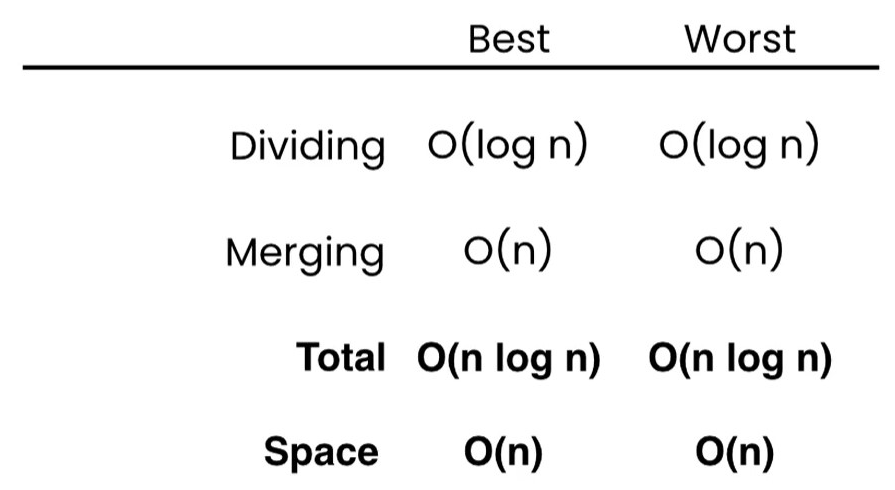
Merge Sort
divide and conquer
need to allocate additional space
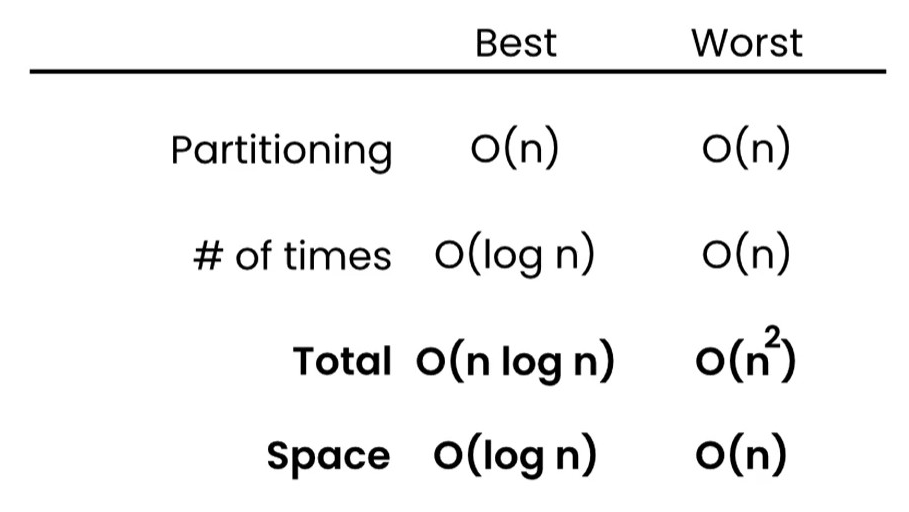
Quick sort
Partition: select a pivot, arrange all the items smaller than the pivot on the left, and other items that greater than the pivot on the right. After each partition, the current pivot is in the right position.
In each pass, the size of the partitions are narrowed down.
Partitioning:
pivot selection:
last item
pick randomly
use the middle index
average of the first, middle and last item
one pointer to iterate the array
one pointer to mark the boundary of the left and right partitions, the end of left partition, initial value is -1
if the item is smaller than pivot, increase the boundary pointer and swap the item
after each pass, move the pivot after the boundary pointer